

计组 - Lab 2: 流水线 MIPS CPU
32 位流水线 MIPS 指令集 CPU,使用 SystemVerilog 编写。
Introduction to Computer Systems II (H) @ Fudan University, spring 2020.
1 MIPS 指令集
同单周期,详见 计组 - Lab 1: 单周期 MIPS CPU。
2 部件构成及分析
2.0 总览

图示为流水线 MIPS CPU 的整体构造,与单周期 MIPS CPU 完全一致,区别在于 CPU 核心 mips 的实现。以下我们仅介绍与单周期 CPU 不同的部分,其余请参见单周期 CPU 的实验报告。
2.1 mips
本流水线 CPU 的实现中,将 datapath 按照流水线的 5 个阶段划分为了 5 个模块(Fetch, Decode, Execute, Memory, Writeback),并增加了一个用于处理冲突的冲突单元(Hazard Unit)。其中各模块的作用如下:
| 模块 | 作用 |
|---|---|
| Fetch | 取指令阶段,从指令存储器中读取指令。 |
| Decode | 译码阶段,从寄存器文件中读取源操作数,并对指令译码以产生控制信号。 |
| Execute | 执行阶段,使用 ALU 执行计算。 |
| Memory | 存储器阶段,读写数据存储器。 |
| Writeback | 写回阶段,按需将结果写回到寄存器文件。 |
| Hazard Unit | 冲突单元,用于发现及处理数据冲突和控制冲突。 |
方便起见,我们将 Fetch 阶段和 Decode 阶段之间的流水线寄存器命名为 decode_reg,并置于 Fetch 模块中,其余流水线寄存器同理。
具体模块的功能分析将在下文阐述。这里 mips 的作用就是将这些模块连接起来,其中相同名称的端口即连通。除此以外特殊的几条连线如下所示:
mips读端口reset,instr,readdata分别与rst,instr_f,read_data_m连通mips写端口aluout,memwrite分别与alu_out_m,mem_write_m连通
了解了以上连接规则后,展示 mips 的完整总览图就不那么必要了。比起大而繁乱的连线总览图,直接看代码甚至都更为直观。
代码见 这里。
2.2 fetch
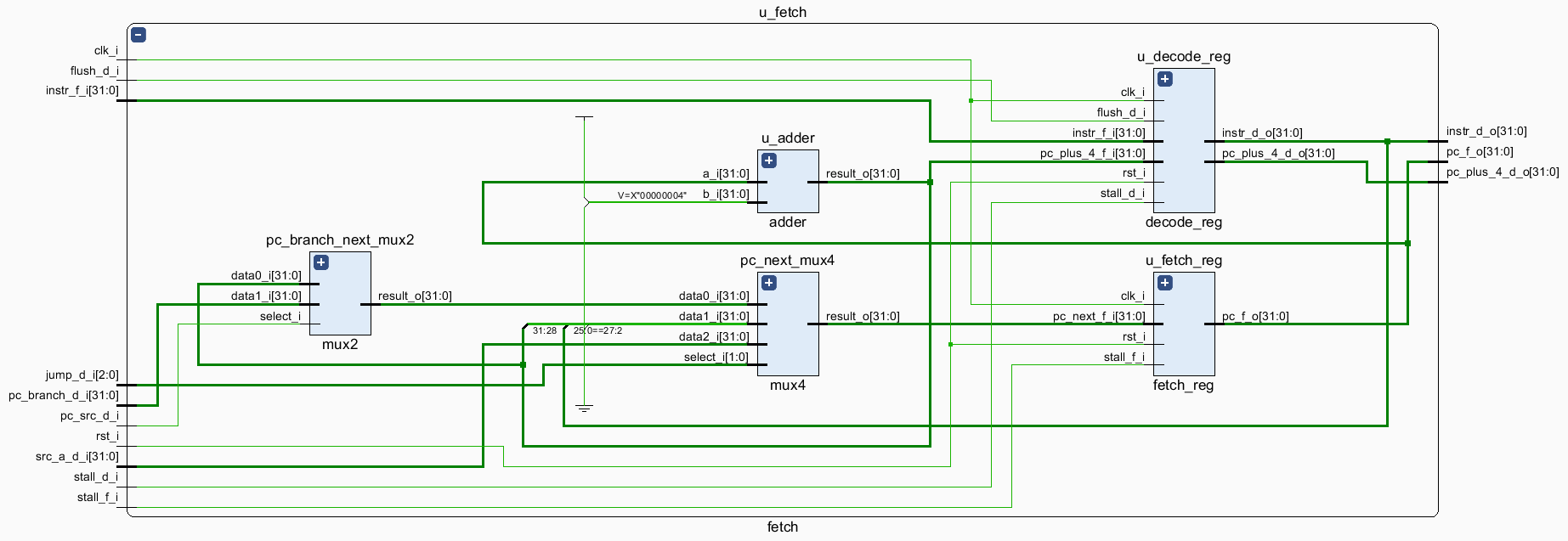
Fetch 阶段,通过 pc_f 输出指令地址 pc 到 imem,通过 instr_f 从 imem 读入指令 instr,存储到流水线寄存器 decode_reg 中,在下一个时钟上升沿到达时从 instr_d 输出。
此外,本阶段还需要完成 PC 的更新。pc_next(新的 PC 值)的选择逻辑同单周期的 2.8 节,这里不再赘述。需要注意的是 Fetch 阶段需要用到一些 Decode 阶段的数据,也就是上一条指令计算得到的相对寻址地址 pc_branch_d、用于指令 jr 跳转的地址 src_a_d 和指令解析得到的 pc_src_d, jump_d 信号,用来确定 pc_next 的值。
在需要解决冲突的情况下,通过 stall_f, stall_d, flush_d 信号决定是否保持(stall)或清空(flush)对应流水线寄存器保存的数据,其中 stall_f 为 1 时保持当前 PC 值不更新,stall_d 为 1 时保持当前 decode_reg 的数据不更新,flush_d 为 1 时清空 decode_reg 的数据。具体这些信号在何时为何值,将在 2.7 节详细阐述。
代码见 这里。
2.2.1 fetch_reg
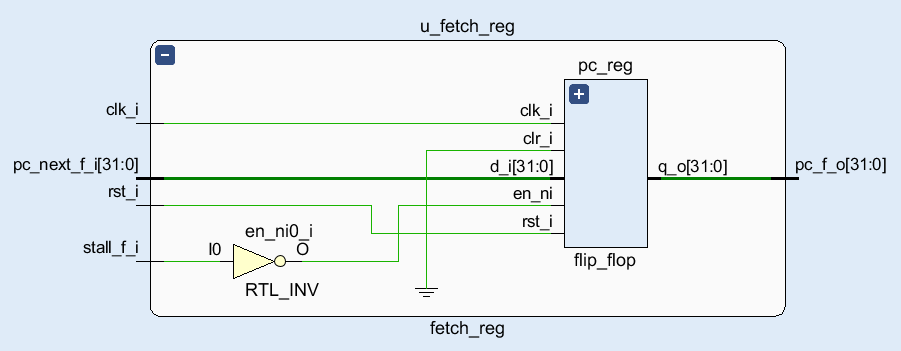
Fetch 阶段流水线寄存器。结构很简单,就是将 PC 寄存器 pc_reg 封装了一下。但相较于单周期版本的 flip_flop,流水线版本做了一些调整。
代码见 这里。
2.2.1.1 flip_flop
这里只说与单周期版本的区别,其余请参见单周期的 2.10 节。
首先增加了一个清零信号 \(\textrm{CLR}\),当 \(\textrm{CLR}\) 为 \(1\) 时,将保存的数据同步清零(\(\textrm{RST}\) 为异步清零),用于 flush 信号。尽管这里 fetch_reg 用不到,但其他流水线寄存器可能会需要,这里是出于部件复用的考虑。其次增加了一个低电平有效的保持信号 \(\textrm{EN}\),当 \(\textrm{EN}\) 为 \(0\) 时,保持数据不变。对于 fetch_reg 来说,其值即 ~stall_f。
代码见 这里。
2.2.2 decode_reg

Fetch 阶段和 Decode 阶段之间的流水线寄存器,中转一下 instr 和 pc_plus_4。为什么需要用触发器中转数据?因为流水线上需要同时跑多条指令(这里是 5 条),需要控制每个阶段各自只在执行一条指令。
这里 instr_reg 的 \(\textrm{CLR}\) 信号为 ~stall_d & flush_d,是为了使 stall_d 和 flush_d 信号互斥,且强制 stall_d 的优先级更高(当 stall_d 为 1 时,flush_d 无效,不允许清零),否则当两者同时为 1 时会导致错误(因为在触发器的实现中,flush 的优先级更高,这将导致指令丢失)。pc_plus_4_reg 不需要清零,因此 \(\textrm{CLR}\) 信号恒为 \(0\)。
代码见 这里。
2.3 decode
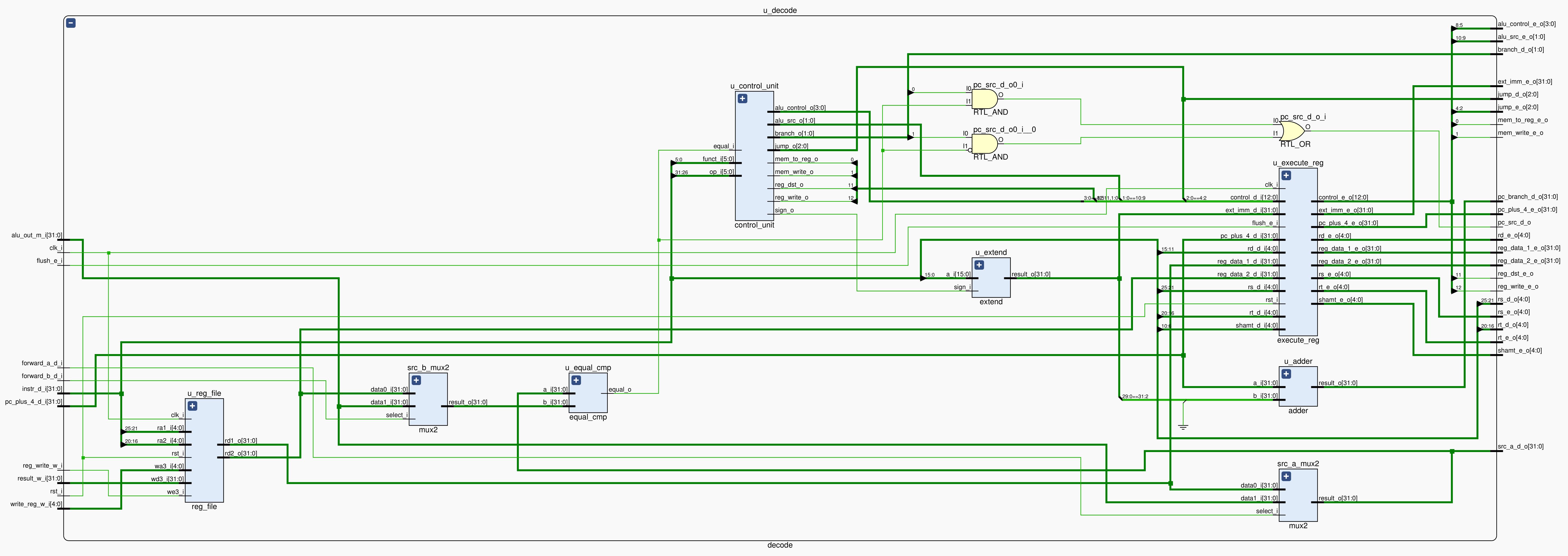
Decode 阶段,读入指令 instr_d,由控制单元 control_unit 解析,决定各个控制信号。此外,本阶段还需要完成相对寻址地址 pc_branch_d 的计算,然后交给下一条指令的 Fetch 阶段。
作为静态分支预测,本阶段新增了比较器 equal_cmp,用来比较从寄存器中读出的两个数 src_a, src_b 是否相等,其作用是将指令 beq, bne 的比较过程提前到 Decode 阶段,提前得到 pc_src 信号,从而提高效率。这里需要用到 Memory 阶段的数据 alu_out_m 以应对数据冒险,src_a, src_b 取值的选择由 forward_a_d, forward_b_d 信号控制。
在实现中,将寄存器文件 reg_file 放在了 decode 模块里,因此 Writeback 阶段的寄存器写入操作也将在这里完成。所以这里需要用到一些 Writeback 阶段的数据,也就是 reg_write_w 信号、目标寄存器 write_reg_w、写入数据 result_w。
在需要解决冲突的情况下,通过 stall_e, flush_e 信号决定是否保持或清空 execute_reg 保存的数据。
代码见 这里。
2.3.1 control_unit
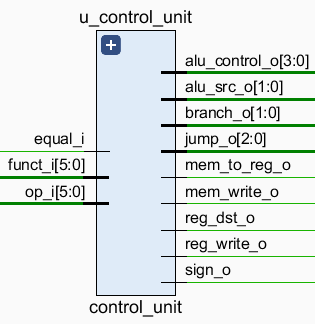
流水线版本中,control_unit 新增了一个控制信号 \(\textrm{SIGN}\),用于控制对立即数进行符号扩展还是无符号扩展,解决了新增测试样例 I-type 中遇到的一些问题。此外为了调试方便,本实现中将控制信号中的无关项 \(\textrm{x}\) 都改成了 \(0\),其余同单周期版本。主译码器中,新增信号的真值表如下:
| 指令 | opcode | sign |
|---|---|---|
| R-type | 000000 | 0 |
addi | 001000 | 1 |
andi | 001100 | 0 |
ori | 001101 | 0 |
slti | 001010 | 1 |
lw | 100011 | 1 |
sw | 101011 | 1 |
j | 000010 | 0 |
jal | 000011 | 1 |
jr | 001000 | 0 |
beq | 000100 | 1 |
bne | 000101 | 1 |
代码见 这里。
2.3.2 equal_cmp

32 位比较器,用于比较两个数是否相等。
使用时读入 \(\textrm{A}\) 和 \(\textrm{B}\),若 \(\textrm{A}\) 和 \(\textrm{B}\) 相等则从 \(\textrm{EQUAL}\) 输出 \(1\)。
代码见 这里。
2.3.3 extend
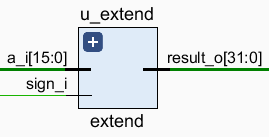
扩展模块的作用是将 16 位的立即数扩展至 32 位。单周期版本中默认使用符号扩展,流水线版本中可以自行选择。
使用时从 \(\textrm{A}\) 读入待扩展的数据,从 \(\textrm{RESULT}\) 输出扩展后的数据。当 \(\textrm{SIGN}\) 为 \(1\) 时使用符号扩展,为 \(0\) 时使用无符号扩展。
代码见 这里。
2.3.4 reg_file
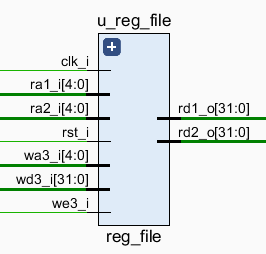
流水线版本中,寄存器文件调整为在时钟下降沿将数据写入,其余同单周期版本。
代码见 这里。
2.3.5 execute_reg
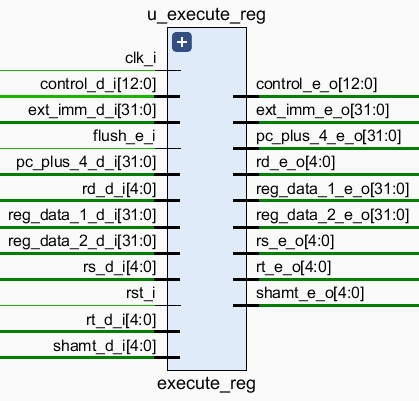
Decode 阶段和 Execute 阶段之间的流水线寄存器,中转一下 control, pc_plus_4, reg_data_1, reg_data_2, rs, rt, rd, shamt, ext_imm,其中:
control是控制信号reg_write,reg_dst,alu_src,alu_control,jump,mem_write,mem_to_reg的集合1。pc_plus_4是PC + 4的值。由于指令jal在之后还要用到这个值,因此继续传到 Execute 阶段。reg_data_1,reg_data_2是reg_file读出的两个值。rs,rt,rd,shamt分别是instr_d的[25:21],[20:16],[15:11],[10:6]。ext_imm是 32 位扩展后的instr_d[15:0]。
结构及原理同 decode_reg,不再赘述。
代码见 这里。
关于信号集合,参见单周期的 2.4 节。
2.4 execute

Execute 阶段,对操作数 src_a, src_b 使用 ALU 执行计算。在单周期版本的基础上,新增了两个 mux4 用于转发逻辑。这里需要用到 Memory 阶段的数据 alu_out_m 和 Writeback 阶段的数据 result_w 以应对数据冒险,read_reg_data, write_data(分别为通常情况下的 src_a, src_b)取值的选择由 forward_a_e, forward_b_e 信号控制。
代码见 这里。
2.4.1 memory_reg
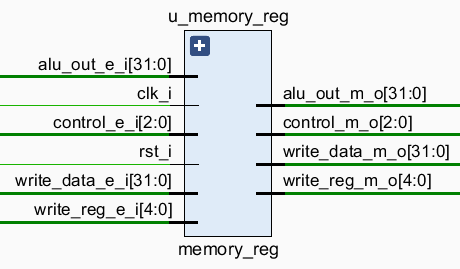
Execute 阶段和 Memory 阶段之间的流水线寄存器,中转一下 control, alu_out, write_data, write_reg,其中:
control是控制信号reg_write,mem_write,mem_to_reg的集合。alu_out通常是 ALU 的计算结果,可能作为写入dmem的目标地址,也可能作为之后需要写入reg_file的数据,之后由传给 Memory 阶段的控制信号控制。对于指令jal,则是之前传下来的pc_plus_4,因为和alu_out要走的路径一致,这里借路继续传到 Memory 阶段。write_data是需要写入dmem的数据。write_reg是之后写入reg_file的目标寄存器。对于指令jal,则为$ra寄存器。
代码见 这里。
2.5 memory
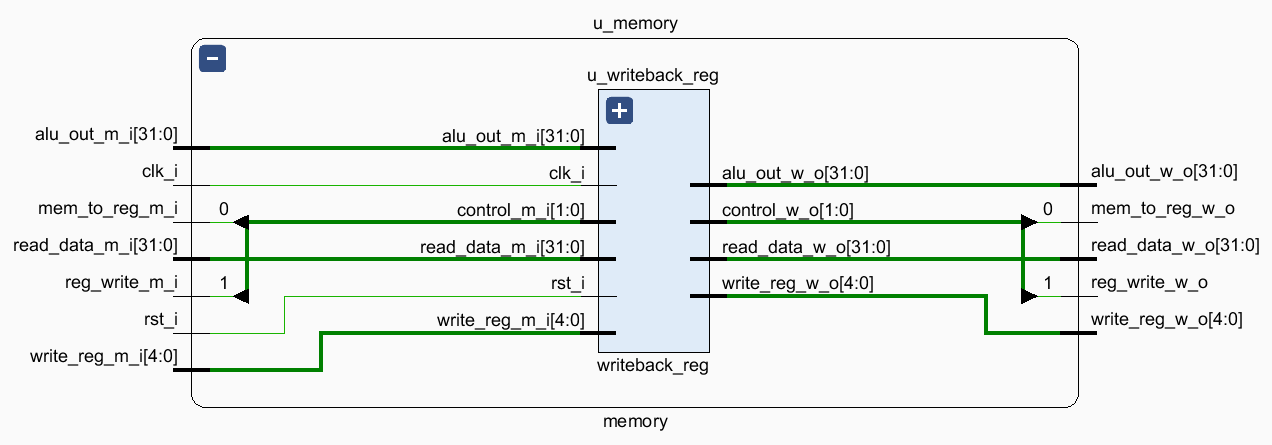
Memory 阶段,当 mem_write 为 1 时,在 dmem 的目标地址 alu_out 存储需要写入的数据 write_data。不过实际上这件事情并不是在 memory 模块内完成的,因为 dmem 在 mips 外面。因此实现中是在 execute 模块通过 mem_write_m, alu_out_m, write_data_m 将 mem_write, alu_out, write_data 直接输出到 dmem,在下一个时钟上升沿到达时(即 Memory 阶段)写入 dmem。memory 模块内则是通过 read_data_m 从 dmem 读入数据 read_data。
代码见 这里。
2.5.1 writeback_reg

Memory 阶段和 Writeback 阶段之间的流水线寄存器,中转一下 control, alu_out, read_data, write_reg,其中:
control是控制信号reg_write,mem_to_reg的集合。read_data是可能需要写入reg_file的数据。
代码见 这里。
2.6 writeback
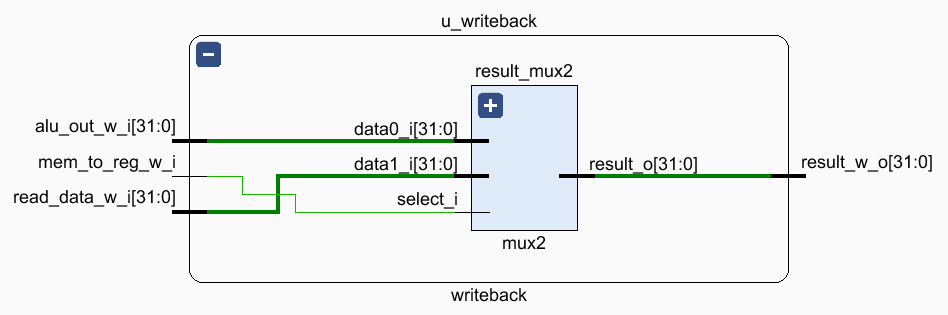
Writeback 阶段,由 mem_to_reg 信号控制 result_mux2 选择写入 reg_file 的数据为 alu_out 还是 read_data。写入逻辑放在了 decode 模块,参见 2.3 节。
代码见 这里。
2.7 hazard_unit
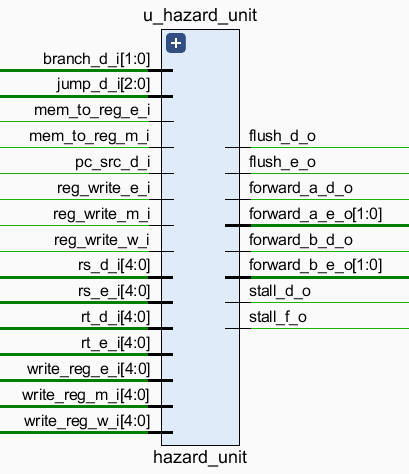
冲突单元根据传入的各阶段寄存器和控制信号,检查是否存在数据冲突或控制冲突,并输出相应的控制信号(forward, stall, flush)以处理冲突。
代码见 这里。
2.7.1 数据冲突
当一条指令依赖于另一条指令的结果,而此结果还未写入寄存器文件时,将发生写后读(Read After Write, RAW)数据冲突。解决 RAW 冲突的方法如下:
- 如果此时这个结果已经在某个阶段被计算出来,那么使用重定向(forward)将数据转发过来;
- 否则,阻塞(stall)流水线直到结果可用。
需注意,$0 寄存器硬连接为 \(0\),因此源寄存器为 $0 时不需要进行转发或阻塞。以下将阐述这两种方法的具体实现。
2.7.1.1 使用重定向解决冲突
当 Execute 阶段的源寄存器 $rs 或 $rt 与 Memory 阶段或 Writeback 阶段(即前两条指令)的写入目标寄存器 write_reg 相同,且其 reg_write 信号为 1 时(即需要写入目标寄存器),重定向对应的 src_a 或 src_b。
以 $rs 的情况为例($rt 同理),重定向逻辑如下:
1 2 3 4 5 6 7 | |
其中当 forward_a_e 为 10 时,Memory 阶段转发的数据是 alu_out_m;当 forward_a_e 为 01 时,Writeback 阶段转发的数据是 result_w。
需注意这里 Memory 阶段的优先级高于 Writeback 阶段,因为 Memory 阶段的指令后执行,阶段中的数据更新。
2.7.1.2 使用阻塞解决冲突
对于指令 lw,因为它有两个周期的延迟,意味着其他指令至少要到两个周期后才能使用它的结果。如果指令 lw 后紧接着一个使用其结果的指令,则使用重定向无法解决这种冲突,此时需要阻塞流水线。现实中,编译器可能会针对这种情况做一定的优化,通过调整指令顺序,在发生数据冲突的两条指令间插入一条无关指令,从而避免这种冲突。
当 Execute 阶段正在执行的指令是 lw(此时 mem_to_reg 信号为 1),且 Decode 阶段的任一源操作数 $rs 或 $rt 与 Execute 阶段的目的寄存器 $rt 相同时,阻塞 Decode 阶段直到源操作数准备好。
阻塞逻辑如下:
1 2 3 4 5 | |
这里阻塞 Decode 阶段的同时也要阻塞 Fetch 阶段,并且刷新(flush)Execute 阶段,产生气泡(bubble)。
2.7.2 控制冲突
当取下一条指令的时候还不能确定指令地址时,将发生控制冲突,此时 CPU 不知道应该取哪条指令。解决控制冲突的方法如下:
- 尝试预测下一条指令地址,先按预测的分支走;
- 如果预测错误,则刷新(flush)流水线。
目前的实现中使用的是静态分支预测,之后我们将实现动态分支预测以获得更好的性能。
不幸的是,引入静态分支预测将导致新的 RAW 冲突,因此需要再次用到 2.7.1 节里解决数据冲突的两种方法。
2.7.2.1 使用重定向解决冲突
如果指令的结果在 Writeback 阶段,则它将在前半周期写入寄存器,在后半周期进行读操作,此时不会产生冲突。如果指令的结果在 Memory 阶段,则可以将它重定向回 Decode 阶段的 equal_cmp。
类似 2.7.1.1 节,以 $rs 的情况为例,重定向逻辑如下:
1 | |
2.7.2.2 使用阻塞解决冲突
如果指令的结果在 Execute 阶段,或者指令 lw 的结果在 Memory 阶段,则需要阻塞流水线。
类似 2.7.1.2 节,阻塞逻辑如下:
1 2 3 4 5 6 7 | |
其中,jump_d[1] 信号为 1 时表示当前指令为 jr。
2.7.2.3 清除无效数据
当发生跳转时,需要清除跳转指令之后多读的一条无效指令,即刷新 Decode 阶段,产生气泡。
刷新逻辑如下:
1 | |
3 样例测试
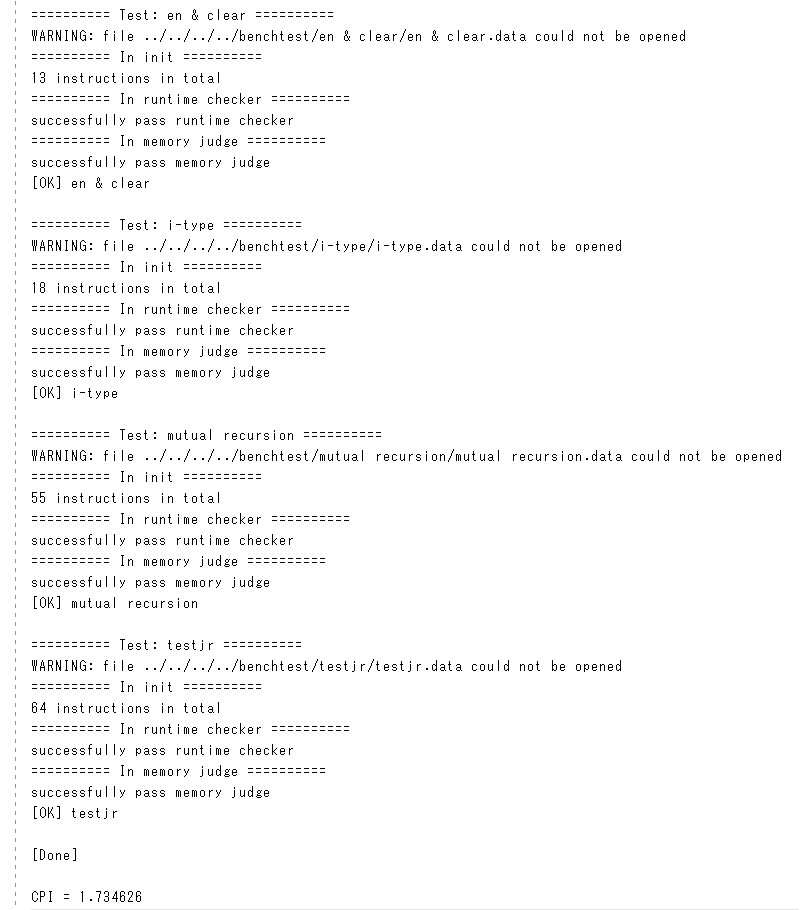
3.1 测试结果

3.2 测试环境
- Windows 10 Version 2004 (OS Build 19041.207)
- Vivado v2019.1
3.3 结果分析
可以看到本实现的 CPI 偏高,经观察发现主要是 bubble sort 的样例 CPI 比较高(达到了 \(1.8\)),其余样例的 CPI 普遍在 \(1.2\) 左右。分析原因可能是因为 bubble sort 的循环较多,而静态分支预测对循环不太友好,跳转指令的 CPI 通常为 \(2\)。如果引入动态分支预测,则跳转指令的 CPI 将更接近 \(1\),从而改善整体的 CPI。
由于时间有限,目前暂未实现动态分支预测,因此这里仅进行理论上的分析。
参考资料
- David Money Harris, Sarah L. Harris: Digital Design and Computer Architecture Second Edition